Hvad er en robot? En grundlæggende definition
En robot er et programmerbart elektromekanisk apparat, der ofte består af en computerstyret arm eller et andet mekanisk system. Maskinen er designet til automatisk at udføre en kompleks serie af handlinger, enten helt autonomt eller med delvis menneskelig kontrol. Kernen i en robot er dens evne til at modtage elektronisk programmering, behandle data eller fysiske sanseindtryk, operere med en vis grad af selvstændighed og manipulere sit fysiske miljø. Ordet robot stammer fra det tjekkiske ord robota, som betyder tvangsarbejde eller slid, og blev første gang brugt af forfatteren Karel Čapek i hans skuespil R.U.R. fra 1921. Siden da har begrebet udviklet sig markant, men den grundlæggende idé om en maskine, der udfører arbejde for mennesker, er stadig central.
For at forstå, hvad en robot er, er det vigtigt at skelne den fra almindelige computere eller simple maskiner. Mens en computer primært behandler information og data, er en robot en fysisk enhed, der interagerer med den virkelige verden. Den har fysiske dele, der kan sanse og manipulere omgivelserne. Dette kan være alt fra en simpel griber på en fabrik til avancerede sensorer, der registrerer temperatur, tryk eller afstand. Ifølge International Federation of Robotics (IFR) defineres en robot som en maskine, der opererer autonomt eller under delvis kontrol for at udføre nyttige tjenester for mennesker, ofte med høj præcision og repeterbarhed. Denne definition understreger robotens rolle som et værktøj, der kan forbedre effektivitet og sikkerhed i mange sammenhænge.
De vigtigste kendetegn ved en robot
Der er flere nøglekarakteristika, der adskiller en robot fra andre maskiner. For det første skal en robot kunne acceptere elektronisk programmering. Det betyder, at dens adfærd kan ændres ved at ændre den software, der styrer den. For det andet skal den kunne behandle data eller fysiske sanseindtryk. Dette indebærer, at robotten har en form for input, som den kan reagere på. For det tredje skal den kunne operere autonomt til en vis grad, hvilket betyder, at den kan udføre opgaver uden konstant menneskelig indgriben. Endelig skal den kunne manipulere sit miljø, for eksempel ved at flytte genstande, svejse eller male.
Roboter udfører typisk opgaver, der er repetitive, farlige eller usunde for mennesker. Dette kan være alt fra at samle biler på en fabrik til at udforske farlige miljøer som vulkaner eller rummet. De er designet til at være præcise og pålidelige, hvilket gør dem ideelle til opgaver, der kræver høj nøjagtighed. En vigtig pointe er, at robotter ikke nødvendigvis behøver at ligne mennesker. De fleste industrirobotter er store mekaniske arme, der slet ikke har nogen menneskelig form. Det er deres funktionalitet og evne til at udføre komplekse opgaver, der definerer dem som robotter, ikke deres udseende.

De tre grundlæggende komponenter i en robot
En funktionel robot består generelt af tre grundlæggende søjler: sensorer, processorer og aktuatorer. Sensorerne fungerer som robotens sanser og indsamler information fra omgivelserne. Dette kan være kameraer, mikrofoner, tryksensorer, temperatursensorer eller afstandssensorer. Processoren er robotens hjerne og behandler de data, som sensorerne indsamler. Den træffer beslutninger baseret på den programmerede software og sender instruktioner til aktuatorerne. Aktuatorerne er robotens muskler og udfører de fysiske handlinger, såsom at bevæge en arm, dreje et hjul eller åbne en griber.
Samspillet mellem disse tre komponenter er afgørende for robotens funktion. For eksempel kan en robot på en fabrik have en sensor, der registrerer, at en del er på plads. Processoren modtager dette signal og beregner den nøjagtige bevægelse, der skal til for at gribe delen. Aktuatoren udfører derefter bevægelsen. Denne cyklus af sansning, beslutningstagning og handling gentages konstant, mens robotten arbejder. Uden en af disse komponenter ville robotten ikke være i stand til at fungere effektivt. Det er denne integration af hardware og software, der gør robotter til så alsidige og kraftfulde værktøjer.
Forskellige typer af robotter og deres anvendelser
Der findes mange forskellige typer af robotter, der spænder fra simple industrielle maskiner til avancerede humanoide robotter. Industrirobotter er de mest udbredte og bruges primært i fremstillingsindustrien til opgaver som svejsning, maling, samling og materialehåndtering. Disse robotter er ofte store, hurtige og meget præcise. De er designet til at arbejde i kontrollerede miljøer og udfører typisk de samme opgaver igen og igen. Servicerobotter er en anden stor kategori og omfatter robotter, der udfører nyttige opgaver for mennesker, ofte i hjemmet eller på offentlige steder. Eksempler inkluderer støvsugerrobotter, plæneklipperrobotter og robotter, der bruges på hospitaler til at levere medicin.
Derudover findes der specialiserede robotter til specifikke formål. For eksempel bruges robotter i rumforskning til at udforske andre planeter, som Mars-roverne. I medicin bruges kirurgiske robotter til at udføre præcise operationer med minimalt invasiv adgang. I landbruget bruges robotter til at høste afgrøder, overvåge afgrøder og sprøjte pesticider. Listen over anvendelser vokser konstant, efterhånden som teknologien udvikler sig. For at give et overblik over de mest almindelige typer, er her en liste over nogle af dem:
- Industrirobotter: Bruges til fremstilling, svejsning, maling og samling.
- Servicerobotter: Bruges til rengøring, pleje, logistik og underholdning.
- Medicinske robotter: Bruges til kirurgi, rehabilitering og diagnostik.
- Militære robotter: Bruges til bombedetonation, overvågning og rekognoscering.
- Udforskningsrobotter: Bruges i rummet, under vandet og i farlige miljøer.
- Humanoide robotter: Designet til at ligne og efterligne menneskelig adfærd.
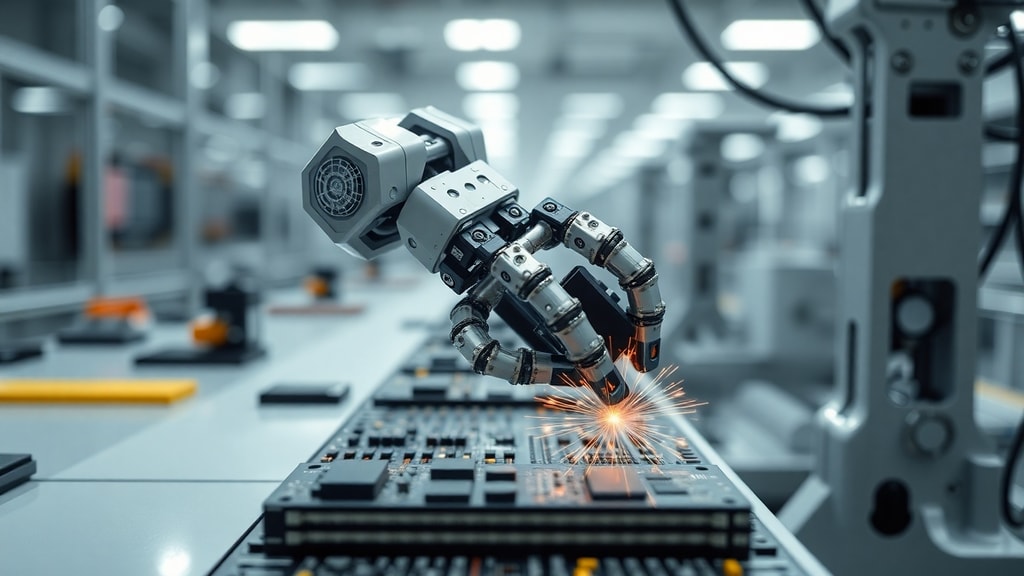
Industrirobotter i praksis
Industrirobotter er en central del af moderne produktion. Ifølge ISO 10218 er en industriel robot en automatisk styret, omprogrammerbar, flerfunktionel manipulator, der kan programmeres i tre eller flere akser. Disse robotter er designet til at supplere menneskelig handling i processer som svejsning, maling og samling. De består af en programmerbar mekanisk manipulator, der kan bevæge sig præcist og gentagne gange. En af de største fordele ved industrirobotter er deres evne til at arbejde døgnet rundt uden at blive trætte, hvilket øger produktiviteten betydeligt.
Industrirobotter bruges i en lang række industrier, herunder bilindustrien, elektronikindustrien, fødevareindustrien og medicinalindustrien. I bilindustrien bruges de til at svejse karosserier, male biler og samle motordele. I elektronikindustrien bruges de til at placere små komponenter på printplader med ekstrem præcision. I fødevareindustrien bruges de til at pakke produkter, sortere fødevarer og håndtere emballage. Brugen af industrirobotter har ført til øget effektivitet, højere kvalitet og lavere omkostninger i mange produktionsprocesser. De har også gjort det muligt at flytte farlige og repetitive opgaver væk fra mennesker, hvilket forbedrer arbejdsmiljøet.

Sammenligning af robottyper
For at give et klarere billede af forskellene mellem de mest almindelige robottyper, er her en tabel, der sammenligner deres vigtigste egenskaber:
| Robottype | Primært anvendelsesområde | Grad af autonomi | Typisk størrelse | Eksempel på opgave |
|---|---|---|---|---|
| Industrirobot | Fremstilling og produktion | Høj, men ofte forudprogrammeret | Stor til meget stor | Svejsning af bilkarosserier |
| Servicerobot | Hjem, hospitaler, kontorer | Moderat til høj | Lille til medium | Støvsugning af gulve |
| Medicinsk robot | Kirurgi og rehabilitering | Moderat, ofte styret af læge | Medium | Præcisionskirurgi |
| Udforskningsrobot | Rum, hav, farlige områder | Høj, ofte autonom | Variabel | Indsamling af jordprøver på Mars |
| Humanoid robot | Forskning, service, underholdning | Moderat til høj | Menneskestørrelse | Interaktion med mennesker |
Tabellen viser, at robotter varierer meget i størrelse, anvendelse og grad af autonomi. Industrirobotter er typisk store og forudprogrammerede, mens servicerobotter ofte er mindre og mere autonome. Medicinske robotter er ofte designet til at arbejde sammen med mennesker, mens udforskningsrobotter skal kunne fungere helt på egen hånd i fjerne og farlige miljøer. Humanoide robotter er stadig primært forskningsprojekter, men de har potentiale til at blive brugt i mange forskellige sammenhænge i fremtiden.
Fremtiden for robotteknologi
Robotteknologien udvikler sig hurtigt, og fremtiden byder på mange spændende muligheder. En af de største tendenser er udviklingen af samarbejdende robotter, også kaldet cobots. Disse robotter er designet til at arbejde side om side med mennesker på en sikker måde. De er ofte udstyret med sensorer, der gør dem i stand til at registrere menneskelig tilstedeværelse og stoppe eller bremse deres bevægelser for at undgå ulykker. Cobots forventes at spille en stor rolle i fremtidens produktion, hvor de kan overtage tunge og repetitive opgaver, mens mennesker fokuserer på mere komplekse og kreative opgaver.
En anden vigtig udvikling er integrationen af kunstig intelligens (AI) i robotter. AI gør det muligt for robotter at lære af deres erfaringer, tilpasse sig nye situationer og træffe mere komplekse beslutninger. Dette åbner op for nye anvendelser inden for områder som landbrug, sundhedspleje og service. For eksempel kan en robot med AI lære at genkende og plukke modne frugter i en mark, eller den kan lære at assistere ældre mennesker med daglige opgaver. Samtidig rejser udviklingen af avancerede robotter også etiske spørgsmål omkring ansvar, privatliv og beskæftigelse. Det er vigtigt, at samfundet forholder sig til disse spørgsmål, efterhånden som robotter bliver en stadig større del af vores hverdag. For mere information om de etiske aspekter, kan du læse mere på Harvard Business Review.
Referencer
Kilderne til denne artikel inkluderer en række troværdige kilder, der belyser definitionen og karakteristikaene ved robotter. Wikipedia giver en grundlæggende definition af en robot som et programmerbart elektromekanisk apparat. Harvard Business Review uddyber de vigtigste kendetegn, herunder evnen til at acceptere elektronisk programmering og manipulere miljøet. International Federation of Robotics (IFR) definerer robotter som maskiner, der opererer autonomt eller under delvis kontrol. Brasil Escola og Tecmundo bidrager med information om etymologi og de tre grundlæggende komponenter: sensorer, processorer og aktuatorer. USP Escola Politécnica og Lenovo US giver indsigt i industrielle robotter og sondringen mellem robotter og almindelige computere. For yderligere læsning om emnet, kan du besøge Wikipedia.